
Alojamientos y experiencias recomendados por Turismo de Estrellas









Científicos de la Universidad de Bristol han realizado las primeras pruebas de robots operados a distancia para emplearlos en la Luna siendo prometedoras
24 October 2024 | Fuente: Universidad de Bristol
¿Te imaginas poder estar desde tu casa dirigiendo un rover por Marte? Es el nuevo reto que se proponen los exploradores teleoperados pues pronto podrían estar trabajando en la Luna, con controladores humanos en la Tierra manipulando las herramientas de los exploradores virtualmente, lo que permitiría una mayor destreza al tomar muestras, excavar o ensamblar.
Los investigadores del laboratorio de robótica de la Universidad de Bristol han probado su nuevo sistema de teleoperaciones en el Centro Europeo de Aplicaciones Espaciales y Telecomunicaciones de la Agencia Espacial Europea (ESA) en Harwell (Oxfordshire). Al controlar una simulación virtual de un rover, pudieron manipular un brazo robótico para excavar una muestra de regolito lunar falso (llamado simulante).
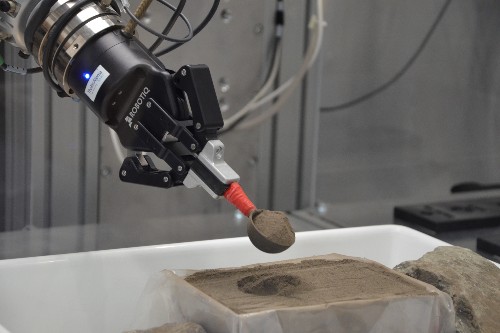 Demostración brazo robótico para excavar una muestra de regolito lunar falso // Joe Louca
Demostración brazo robótico para excavar una muestra de regolito lunar falso // Joe LoucaEl proceso elimina la necesidad de transmisiones por cámara, que pueden demorarse debido al retraso de tiempo de 1,3 segundos entre la Tierra y la Luna. Las señales entre los teleoperadores y las misiones robóticas en la Luna podrían en el futuro ser retransmitidas por satélites pertenecientes al proyecto Moonlight planeado por la ESA.
Relacionada:
"Esta simulación podría... ayudarnos a operar robots lunares de forma remota desde la Tierra, evitando el problema de los retrasos en la señal", dijo Joe Louca, el autor principal de la investigación, de Bristol en un comunicado.
La simulación virtual también incorpora interacciones "hápticas". En otras palabras, le da al usuario una sensación de tacto, imitando las propiedades táctiles del regolito lunar en la baja gravedad de la Luna. Esto les da a los teleoperadores una mayor sensación de cuánta fuerza tienen que usar para excavar en el regolito o para levantar una muestra en una pala.
Hasta ahora, las interacciones hápticas solo se han incluido en las versiones virtuales de tareas básicas, como presionar el regolito en el suelo o arrastrar una pala a través de él, pero aún no para tareas más complejas.
Además, el sistema también podría utilizarse para entrenar a los astronautas que algún día podrían ir a la Luna, proporcionándoles una simulación realista de lo que les espera.
Sin embargo, antes de que eso suceda, dice Louca, hay que superar algunos problemas de confianza. Estudios anteriores han demostrado que existe una barrera psicológica que impide confiar en que el sistema virtual que está utilizando un usuario funcione como debería en la realidad.

El equipo de Louca ha cuantificado la eficiencia y la fiabilidad de su sistema virtual y ha descubierto que, al extraer el simulante de regolito, el sistema era eficiente el 100 % del tiempo y fiable el 92,5 % del tiempo. Verter el simulante desde la pala era un poco menos fiable, pero descubrieron que, al restringir la orientación de la pala mientras se transportaba el simulante, se podía realizar con mayor precisión.
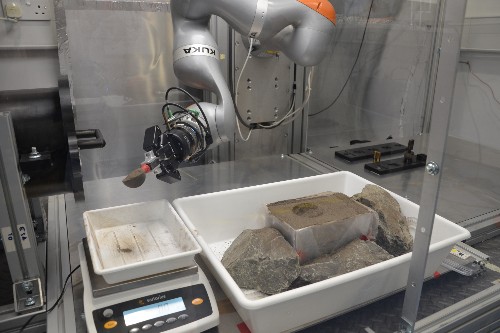 En Marte podía resultar útil para recuperar tubos de muestra de un explorador y cargarlos en otro vehículo // Crédito: Joe Louca
En Marte podía resultar útil para recuperar tubos de muestra de un explorador y cargarlos en otro vehículo // Crédito: Joe LoucaAunque el diseño se ha realizado teniendo en mente la Luna, en principio las mismas técnicas de teleoperación también podrían utilizarse en misiones a Marte. Esto podría resultar especialmente útil para la difícil tarea de recuperar tubos de muestra de un explorador y cargarlos en otro vehículo que despegaría de Marte y traería las muestras de vuelta a la Tierra.
Como el presupuesto y el cronograma del actual proyecto de retorno de muestras a Marte de la NASA se han salido de control, la agencia espacial ha solicitado a la industria que ayude a desarrollar una solución. Rocket Lab ganó recientemente un contrato para realizar un estudio detallado sobre una posible solución para recuperar las muestras del rover Perseverance, aunque puede ser demasiado pronto para que la teleoperación desempeñe un papel. Sin embargo, otras misiones de retorno de muestras y exploración a la Luna, Marte y otros cuerpos rocosos como los asteroides pueden beneficiarse de la teleoperación en el futuro.
"En la próxima década veremos varias misiones tripuladas y no tripuladas a la Luna, como el programa Artemis de la NASA y el programa Chang'e de China ", dijo Louca. "Esta simulación podría ser una herramienta valiosa para apoyar la preparación o la operación de estas misiones".

















